לילה. ים פתוח. על פני השטח אין כמעט דרמה: קו אופק שחור, כמה נקודות אור רחוקות, שקט שמטעה את מי שמביט מבחוץ. אבל בתוך הגזרה כבר פועלת להקה של כלים ימיים בלתי מאוישים. אחד אוסף תמונת מצב, אחר מחזיק קו חיפוש, שלישי סוטה מעט כי זיהה הפרעת ניווט, ורביעי תופס עמדה חדשה כי כלי אחר יצא מהמשימה. אף אחד לא “נוהג” בהם מרחוק כמו מכונית צעצוע. דווקא בים, המקום שבו תקשורת נשברת, רוחב הפס מוגבל, וה-GPS עלול להיות משובש או מזויף, מודל ההפעלה הזה נעשה פחות ופחות רלוונטי. במקום שליטה רציפה מכלי מאויש או מחדר בקרה, נבנית שכבת אוטונומיה שמאפשרת לכל כלי להבין את סביבתו, לשמור על הכוונה המבצעית, ולתאם את עצמו עם אחרים גם כשאין עם מי לדבר. המהפכה האמיתית, לכן, אינה הסירה הרובוטית עצמה, אלא היכולת של להקה ימית לקבל החלטות מבוזרות לבד.
הסיבה הבסיסית היא שהים הוא סביבה מורכבת לשליטה ריכוזית -מחקרים צבאים ואזרחיים מצביעים שוב ושוב על ארבעה אתגרים מרכזיים: תקשורת, ניווט, בקרה והפעלה מבוססת-נתונים. בתקשורת הבעיה חריפה במיוחד: תקשורת אקוסטית, תקשורת אלקטרומגנטית ואופטית סובלים כל אחד ממגבלות של רוחב פס, שיהוי, טווח, הפרעות וסביבה משתנה. במילים פשוטות – קשה לסמוך עליהן במיוחד שהמצב נהיה כאוטי.
גם הניווט אינו מובן מאליו; תוכנית SBIR של הצי האמריקאי (שנחשב המתקדם בעולם) הגדירה צורך בטכנולוגיות מיקום פסיביות כאשר GPS נפגע או אינו זמין, והדגישה כי הטכנולוגיה הקיימת יכולה רק “למתוח זמן” לפני שהשגיאה מצטברת גורמת לכלי לצאת מהמסלול. לכן, בים, השאלה איננה האם נוח להוסיף AI, אלא איך שומרים על משימה כאשר הקישור לא אמין והניווט חלקי. אם כל שינוי מסלול, העברת תפקיד או תגובה לאיום חייבים לעבור דרך מפעיל אנושי, הלהקה כולה נהפכת לשברירית.
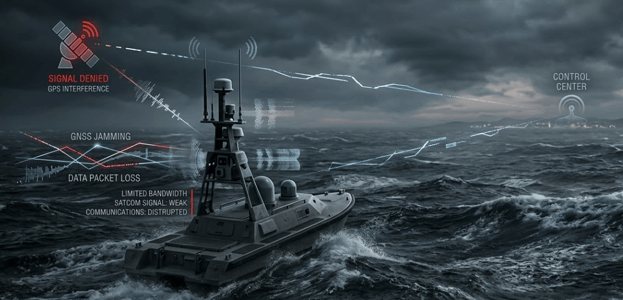
USV בים עוין: ניווט ושרידות תחת שיבושי GPS ותקשורת
הנקודה הטכנית החשובה היא שאוטונומיה ימית איננה אלגוריתם אחד, אלא שכבות של שיטות שעובדות יחד. בשכבה הראשונה נמצאת התפיסה: הכלי צריך להבין איפה הוא ומה יש סביבו. כאן נכנסים מיזוג חיישנים, או sensor fusion, ושיטות localization עמידות ל-GNSS פגוע. במקום להישען רק על GPS, המערכת מחברת יחד IMU, מדידות מהירות, מצלמות, מכ"ם, ולעיתים גם חיישני עומק או סונר, כדי לבנות הערכת מצב יציבה יותר. דוגמה בולטת הופיעה ב-2025, כש-Saildrone הודיעה שהמערכת שלה מסוגלת לפעול אוטונומית גם בסביבה של GPS-denied או spoofed באמצעות “multiple forms of localization” ולא דרך מקור יחיד. מחקרי USV חדשים מצביעים על אותו כיוון בדיוק: ניווט ימי נעשה עמיד יותר ככל שהמערכת נשענת על כמה מקורות חישה ומבצעת ביניהם הצלבה מתמשכת.
השכבה השנייה היא בקרה וניווט. כאן לא מדובר רק ביכולת להחזיק קו, אלא ביכולת לתכנן מסלול מחדש בזמן אמת. מערכות כאלה משלבות מתכנני מסלול קלאסיים עם שיטות הסתגלותיות יותר, ולעיתים גם עם למידת חיזוק, כדי להתמודד עם מכשולים, ים דינמי, כללי COLREGs, ומגבלות תנועה של כלי קטן. הסקירות האחרונות בתחום מדגישות מגמה ברורה: מעבר ממערכות ניווט “קשיחות” יחסית למערכות guidance and control שיש בהן שכבה data-driven ולמידה מבוססת ניסיון. במערך להקתי, זה מתרחב מהשאלה “לאן אני מפליג?” לשאלה “איך אני מפליג כך שהקבוצה כולה תשמור על המבנה ועל המשימה?”.
השכבה השלישית, והיא זו שהופכת אוסף כלים ללהקה, היא תיאום מבוזר. כאן מופיעים מושגים כמו distributed consensus, task allocation ו-multi-agent reinforcement learning. הרעיון אינו שכל כלי יקבל תמונה מלאה של כל הזירה, אלא להפך: שכל יחידה תעבוד עם תמונה מקומית, תשתף רק את המידע החיוני, ותדע להסיק כיצד להתאים את עצמה לקבוצה. אם יחידה אחת נופלת, אחרות מחלקות מחדש את הגזרה; אם זוהה אזור מסוכן, המבנה משתנה; אם נפתח חלון תקשורת קצר, המערכת מסנכרנת רק את מה שבאמת קריטי. ב-ONR מגדירים זאת בפשטות יחסית אבל בצורה חדה: פיתוח distributed algorithms שיאפשרו לקבוצת סוכנים לתפקד כנחיל, כולל חקירה של יכולת פעולה ללא תקשורת בין המשתתפים. זה בדיוק הלב של הלהקה הימית האוטונומית.
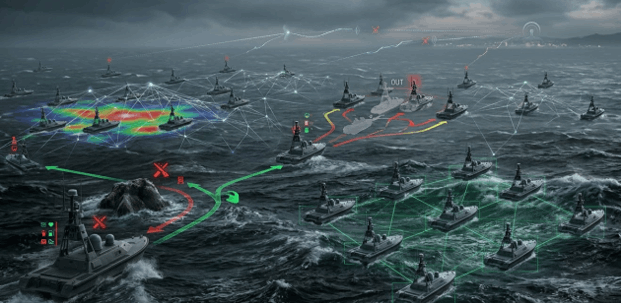
נחיל ימי מתואם: מסלולים דינמיים, איומים משתנים, ורשת מבוזרת
בינואר 2024 הוקמה Task Group 59.1, שממוקדת בפריסה מבצעית של מערכות בלתי מאוישות בשילוב מפעילים מאוישים, ובאוקטובר 2024 תיאר הצי את Digital Talon 3.0 כזירה לבחינת פתרונות תעשייתיים והפעלה מבצעית של צוותים מאוישים ובלתי מאוישים יחד. בדוגמה אחרת, בתרגיל Digital Horizon, Task Force 59 הדגימה גם שכבת תקשורת רלוונטית מאוד לדיון הזה: mesh networking. לפי הודעת הצי, הרשת אפשרה למערכות בלתי מאוישות להעביר דימות למפקדות בים ובחוף גם ב־communications denied environment. המשמעות המבצעית עמוקה: לא ערוץ יחיד שנשבר ומשתק את הכוח, אלא רשת שבה כל פלטפורמה יכולה לשמש גם כחיישן וגם כצומת תקשורת. כך AI והאלגוריתמיקה אינם רק “קבלת החלטות”, אלא גם חסכון בתקשורת ועמידות תקשורתית.
גם בצד הרכש והבנייה זה כבר קורה. באוגוסט 2024 הודיעו הצי ו-DIU על שותפות לפרוטוטייפים של small unmanned surface vehicles. בדף העובדות של הצי, שפורסם ב-2025, כבר מופיעה משפחת sUSV כמסגרת מבצעית רחבה יותר, כולל הדגמות שיגור של כמה GARC מספינה במרץ 2025 ותעסוקה של Saildrone Voyager עבור משימות ISR. זו בדיוק התמונה האסטרטגית החדשה: לא כלי בודד, אלא ארכיטקטורה של הרבה כלים קטנים, מחוברים חלקית, שמסתמכים על אוטונומיה מקומית.
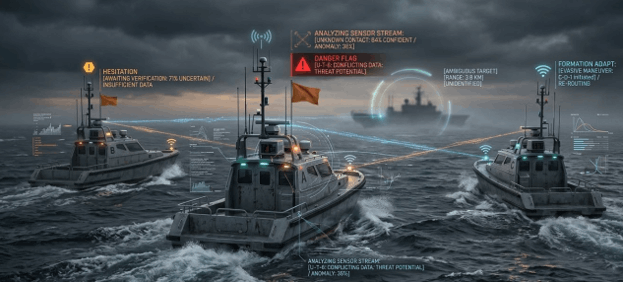
כלים אוטונומיים מנתחים איומים ומסתגלים בזמן אמת בתנאי ערפל מידע
אם מחברים את ההתפתחויות האילו למלחמה באיראן, רואים עד כמה הרעיון של להקה ימית אוטונומית כבר אינו תרגיל עתידני אלא צורך מבצעי. המרחב שבין המפרץ הפרסי, מצרי הורמוז ומפרץ עומאן מציג בדיוק את תנאי הקצה שעליהם המערכות האלה נבנות: MARAD האמריקאי מזהיר כעת מפני תקיפות איראניות על כלי שיט מסחריים באזור, ו-JMIC/UKMTO מדווחות על שיבושי GNSS/GPS, spoofing, jamming ואנומליות AIS מתמשכות, שפוגעים באמינות הניווט ומגדילים את הסיכון למיסקלקולציה גם בלי פגיעה ישירה. בתנאים כאלה, כוח ימי שמבוסס רק על קישור רציף, GPS נקי ומספר קטן של פלטפורמות גדולות נעשה פגיע יותר. לעומת זאת, להקה של כלים קטנים עם חישה מבוזרת, sensor fusion, תיאום מקומי ורשת mesh יכולה לשמר נוכחות, סיור והתרעה גם בתוך “ערפל אלקטרוני” וגם תחת איום של טילים, כטב"מים וכלים מהירים.